PULSAR HRI Ecosystem Documentation
![]()
![]()
Welcome to the PULSAR HRI Ecosystem Documentation!
Whether you're a researcher, developer, or engineer, the content on this website will help you get up and running with PULSAR products. PULSAR HRI develops best-in-class actuation systems and a surrounding ecosystem to enable next-generation robotics.
⚡ First Time Here?
If you can't wait to see your actuator moving, just go straight to the No-Code GUI Quickstart to set up, power your actuator and get moving in minutes controlling it directly from your browser!
Tip
Make sure to read the following short section: it will allow you to easily find what you need on the website.
🧭 Ecosystem Overview
At a glance, these are the main elements of the PULSAR HRI ecosystem:
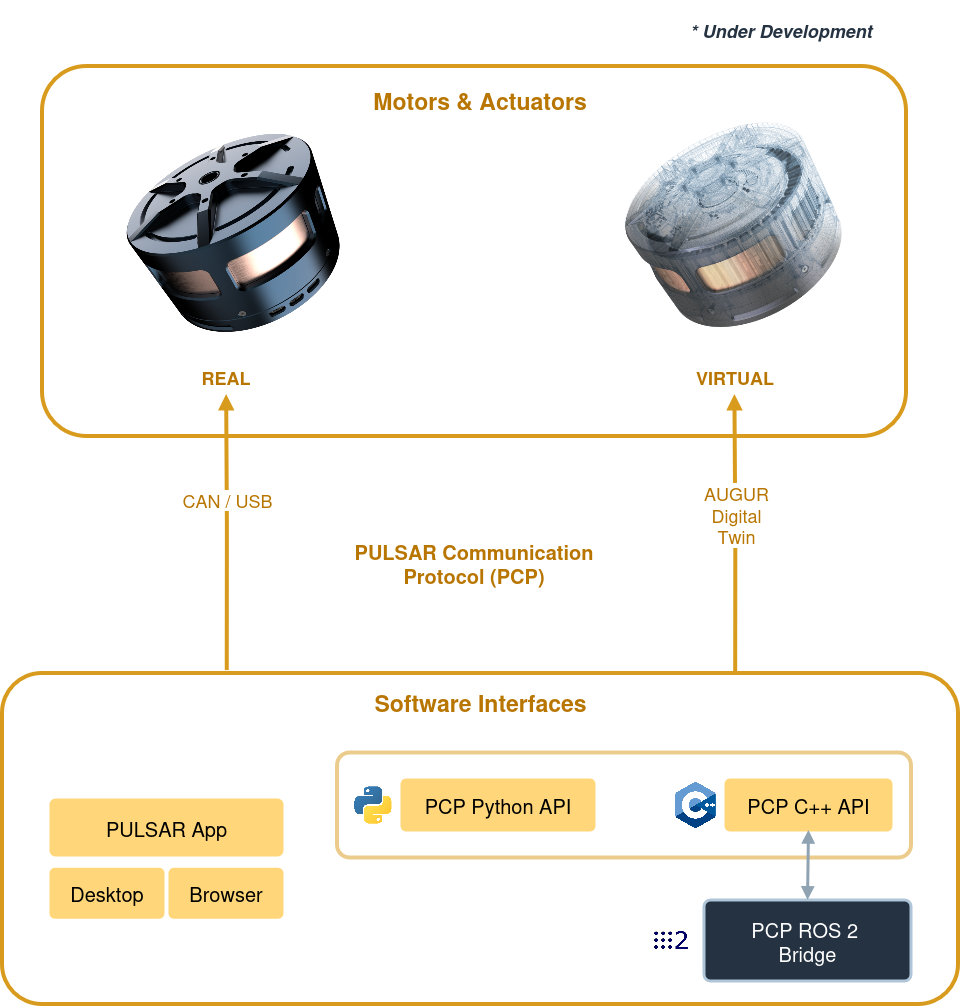
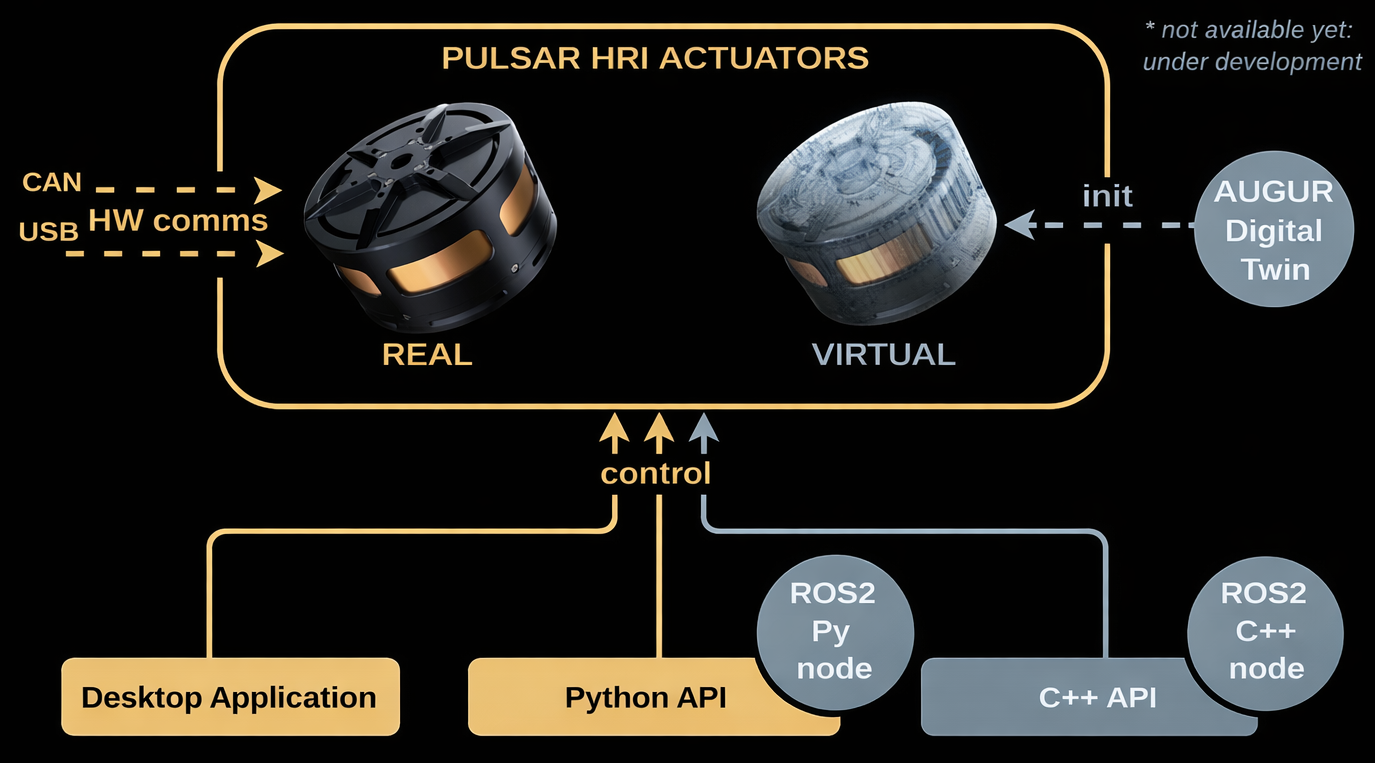
Motors & Actuators
- REAL ACTUATORS which, once set up, offer the following hardware communication interfaces:
- Direct USB connection, to connect to a single actuator for quick tests and firmware updates.
- CAN communication (CAN FD at selectable 1 or 5 Mbps), to connect to multiple actuators in robotic systems.
- VIRTUAL ACTUATORS closely matching their real counterparts' behavior. These virtual actuators can be set up through:
- AUGUR Digital Twin (DTwin): a first beta release is available for Linux x86_64. It models the physics of the real actuator and runs the exact same control algorithms.
- AUGUR Digital Twin (DTwin): a first beta release is available for Linux x86_64. It models the physics of the real actuator and runs the exact same control algorithms.
- CONTROL MODES such as torque, speed, position, and impedance run at the lowest level in the same way on real actuator firmware and in the virtual AUGUR Digital Twin model. See the Control Modes Overview for the shared behavior and terminology.
Control
- SOFTWARE INTERFACES of different kinds and for different needs, used to control both real and virtual actuators:
- PULSAR App GUI: A no-code GUI for single-actuator testing, available in the browser or as a desktop package
- offering the easiest quickstart experience to get familiar with PULSAR HRI actuators and their control.
- Python API: A flexible way to control real and virtual actuators from Python, from quick experiments to multi-actuator workflows at high update rates, both for Real and AUGUR-powered Virtual Actuators
- C++ API: A lower-level option for more demanding and real-time applications.
- PULSAR App GUI: A no-code GUI for single-actuator testing, available in the browser or as a desktop package
Note
A quick alignment on naming we use:
- Motors = Direct-drive units without a transmission.
- Actuators = Motors with an integrated transmission.
A question we often hear is:
"How are you different from other actuator companies?"
Glad you asked. Check out PULSAR HRI's website for answers!
🆘 Need help?
Visit our Support page or check the FAQ.